|
|
It's been a while (north of 40 years),
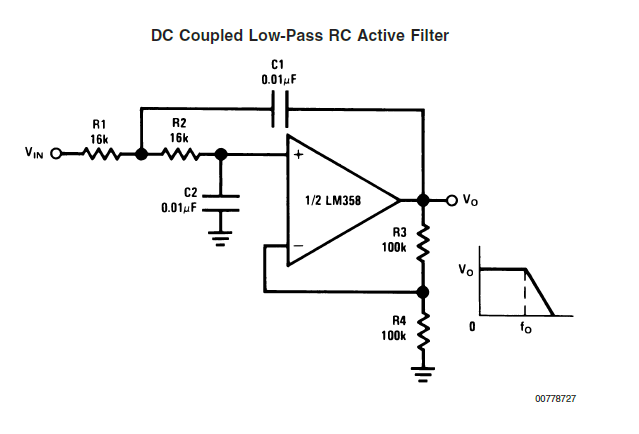
but IIRC, and you're using the circuit on the National datasheet,
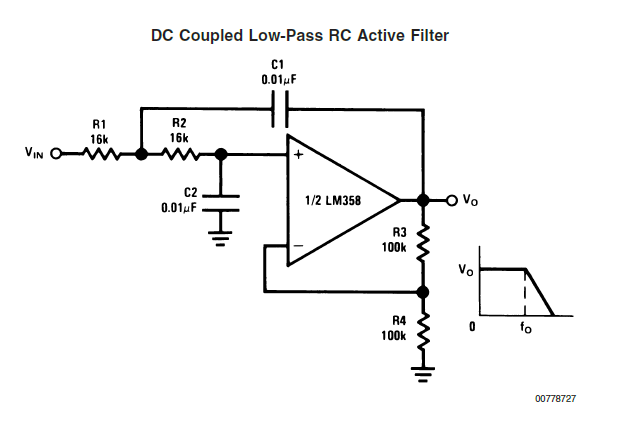
I think it's a 12dB/octave filter. Each R/C pair should be 6dB
slope.
R4 not grounded....?? It's been way too long; not sure what would
happen if R4 is left floating. Infinite (open loop) gain?
On 3/19/2021 10:03 AM, Finn Lassen finn.lassen@verizon.net wrote:
Found a
soldering error on my circuit. So only 100x amplification and a Q
of 0.5 on the RC filter (not sure what that translates to in
dB/octave).
(LM358 datasheet "DC-coupled low-pass RC active filter). R4 not
connected to ground. A = 1 + R3/R4. Q = 1/(3 - A). What does a
negative Q mean? Unfortunately with A = 3 filter starts
oscillating. So need to lower or increase filter amplification.
Well, if there are two combustion events per rotation the
near-sine curve doesn't make any sense. Then there should be two
cycles between trigger pulses. If not combustion-related then a
weight on one of the four bolts should have reduced amplitude
somewhat, but on each bolt it got worse but didn't influence the
curve much. Now I have no idea what the curve comes from.
I like the old school idea.
As for flying off the hours and then flying to your place, the
reason I'm revisiting balancing now is that on my last flight I
noticed a vibration at 144 mph and 5,600 RPM. Took the prop off to
recheck static balance (didn't note where to put washers when I
last did it months ago). With the prop off, I thought I might try
to check engine balance (You mentioned reports of problems
balancing geared Rotax and Steve had mentioned that he first
balanced the engine, then the prop.) A week later I'm into filter
theory, FFT (spectrum analysis) and so on, trying to make my own
instrumentation and balancer. Typical for me :(
Should probably just have remounted the prop with the washers
needed from static balancing and gone flying. Oh, well...
Then there's cooling. Tracy thinks my rad coolant deltas are still
to big. Need to get rid of 90 deg elbow in return line from one
rad and another in the supply to the other rad. Then there's oil
and fuel leaks ... What to do first?
Finn
On 3/18/2021 7:38 PM, Charlie England ceengland7@gmail.com wrote:
Each rotor fires once per rev, so the
engine has one torque pulse every 180 degrees of E-shaft
rotation.
If the sine wave might be combustion related, can you move the
sensor array (both trigger and vibe sensor) 90 degrees &
compare timing of the peaks to the original configuration? If
it's combustion events, then sine wave will 'move' 90* earlier
or later related to the trigger point. If it's actual imbalance,
the peak should follow the sensor array.
Filter frequencies are typically spec'd at the -3dB 'knee'
point. So if the filter was constructed based on frequency 'x',
then rolloff will start significantly sooner than the spec freq.
How much sooner depends on what 'order' the filter is. 1st order
(6 dB/octave) will begin to roll off *much* earlier, removing
more in-band and *not* filter out as much out-of-band as a 3rd
order filter (18 dB/octave), which has a much steeper slope. If
you want to avoid affecting in-band levels, the cutoff must be
significantly out of band. See the 'Butterworth' filter graph on
Wikipedia. https://en.wikipedia.org/wiki/Low-pass_filter
Have you thought about going 'old school' with balancing? Rig
one of your LED landing lights to trigger off the peak pulse of
the ADXL335, put a 'witness mark' on the face of the flywheel,
and the strobe will show you the rotational position of the
flywheel when the ADXL335 feels the peak out-of-balance.
Or, you could let an A&P do it. Or get on with flying your
time off, and then fly it up here; I've got our EAA chapter's
Dynavibe in my hangar...
Charlie
On 3/18/2021 3:38 PM, Finn Lassen finn.lassen@verizon.net wrote:
LED and photo transistor in same
housing. I put it inside a 1/2" CPVC tube so I can't read the
part number.
In an ideal world, a mass rotating around a center point
should produce a sine curve. But what if you have more than
one mass? You should be able to use vector math to find the
resulting single equivalent mass.
However, looks like a combustion engine is not that simple.
I'm now fairly confident that the near-sine curve I see on the
scope is mainly the combustion event. Someone need to refresh
my memory: how many times does combustion occur per flywheel
rotation? Looks to me like one. Rotor 1, then next rotation
rotor 2, then next rotation the next surface of rotor 1, etc.
Is that right?
To make matters worse, you also have other sources of
vibration: alternator, water pump, etc. Their vibrations
(different frequencies) are added to the basic one period per
flywheel sine curve. If I'm right, the combustion event won't
be a simple sine curve either: a pulse resolves into multiple
frequencies (spectrum).
When you look at a scope the signal is not stable: any little
misfire will jar it up or down. Makes is really hard to read
amplitude on scope.
In theory, a real effective low pass filter should remove all
other frequencies than the one you're interested in but
doesn't seem to work all that well in practice. So, back to
FFT on my Arduino Nano. Basically using FFT to produce a
frequency spectrum.
My Arduino program takes 128 samples with a sampling frequency
of 300 Hz. Sampling starts at the trigger pulse (may or may
not be a good idea). This is repeated 8 times and averages
calculated. Then the FFT transforms the 128 sample values into
64 frequency "bins", the magnitude of each are then plotted.
Using Ernest's method, I took 5 readings (no nut, then a 1/4"
lock nut zip-tied to each bolt nut in turn), running engine at
or just below 3,000 RPM (50Hz). (Varied RPM slightly using
mixture knob to ensure got result in the 50 Hz bin only)
(Basically using the FFT as a band-pass filter.)
Result was that the 4.4g weight worsened the amplitude at bolt
1, 2, 3 and 4.
No nut: 5-10 (varying between 5 and 10 on successive plots)
Bolt 1: 20-22
Bolt 2: 18-20
Bolt 3: 30
Bolt 4: 20-22
So if adding a 4.4g weight increases vibration at least by a
factor 2 no matter where it's added, I decided that's good
enough, removed it and called it quits. Onto prop balancing.
(Except, should probably remove the PSRU and replace the oil
seal now that the prop is off ...)
Now, my circuitry doesn't match theory. The LP filter op-amp
should have had a 3x amplification and 3db frequency at 120
Hz. A following op-amp should have 100x amplification. Hooked
up a generator to the input instead of the ADXL335 and
measured input and output. Filter amp has no amplification and
the filter seems to cut in way lower than 120Hz. The following
op-amp only seemed to have 80 to 90x amplification. I should
probably use low-noise op-amps as Charlie suggested instead of
the LM358. The LM358 runs on single-supply voltage (5V) but
that requires caps between filter output and amplifier input.
I guess I should make a schematic and submit for critique. Got
the theory from my electronic tech apprenticeship papers back
in 70's.
As for measuring phase or angle on the scope, sort of can be
done. But again, this is not an electric motor!
Also the FFT gives both amplitude and phase info for each
frequency "bin", but I have not been able to relate that to
the trigger pulse. Hmmm, now I think I get it. Supposed to
have two channels being sampled simultaneously: one the
trigger pulse, two the accelerometer. Not sure I want to spend
more time on it at the moment. The "nut" methods appear a lot
simpler (although require more runs).
Finn
---
This email has been checked for viruses by Avast antivirus
software.
https://www.avast.com/antivirus
--
Homepage: http://www.flyrotary.com/
Archive and UnSub:
http://mail.lancaironline.net:81/lists/flyrotary/List.html
hlfcohnmdibepicp.png
|
|